BOa tarde
estou usando arduino mega e eipse E3, em rede modbus , usando o drive modicon normalmente
estou lendo temperatura e umidade , com sensor dht22
estou com problemas para ler a parte decimal da temperatura e da umidade
no codico arduino , temperatura e umidade s~]ao variaveis tipo float
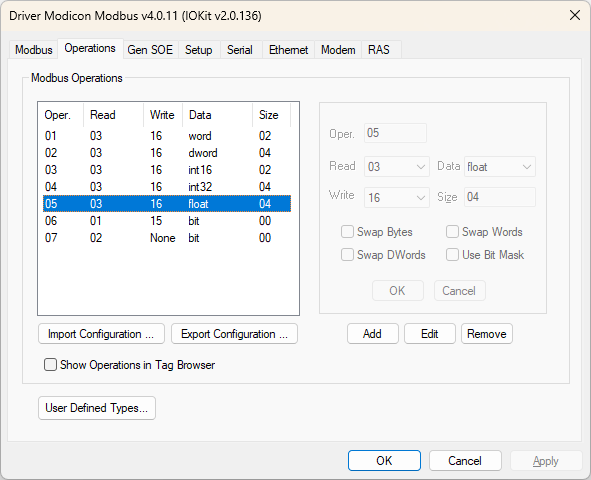
quando passo para o e3 via modbus, so consigo ler se usar word , no drive
se mudar P2 para 5 que é uma float , noa le nada
se deixar em P2 igual a 1 que é uma word le normal, somente o inteiro da variavel
alguem com mais experiencia consegue me ajudar nessa